Ils ne doivent pas nécessairement tourner dans la même direction, mais cela donne les meilleurs résultats.
Cela a à voir avec les mathématiques du vol de drone. Tirant de https://drones.stackexchange.com/a/419/46, et en particulier de la matrice de mixage:
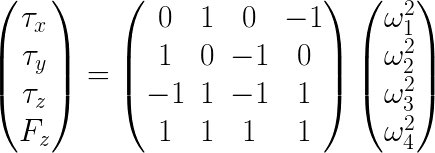
(où ω est la vitesse du moteur, τ est le couple autour des axes, et F est la poussée verticale. De plus, les signes +/- indiquent si un moteur tourne dans le sens horaire ou antihoraire.)
Cette matrice de mélange est le calcul qui nous permet de déterminer les vitesses de moteur requises pour le mouvement (roulis / tangage / lacet / poussée). Sans cela, rien ne peut fonctionner - un quadcoptère tombera comme un rocher sans contrôle moteur autonome.
La matrice de mélange est subtile en ce qu'elle raconte l'histoire de l'avion. Pour le lacet, en particulier, nous nous intéressons à la relation couple-z sur la troisième rangée. S'il y avait d'autres combinaisons de signes +/-, c'est-à-dire que vous n'aviez pas de moteurs opposés tournant dans la même direction, alors la matrice perdrait soit:
-
une propriété spéciale appelée inversibilité . Sans cette propriété spéciale, il n'y a AUCUNE combinaison possible de vitesses du moteur qui puisse nous donner une combinaison arbitraire de roulis, tangage, lacet et poussée.
- Cela signifie que tout devient couplé. Vous ne pouvez pas faire pivoter le drone à droite sans rouler et / ou tanguer et / ou grimper accidentellement. Pas très utile!
-
créer un espace de contrôle d'accessibilité déséquilibré, ce qui est une manière formelle de dire que l'hélicoptère ne se comportera pas symétriquement par rapport aux axes de roulis, de tangage et de lacet.
- ce n'est pas idéal, qui veut un drone qui tourne à 270 degrés vers la gauche plus vite que 90 degrés vers la droite?
Contexte
Nous avons l'habitude de voir des équations algébriques telles que a = b * x , où nous pouvons diviser par b pour obtenir x . C'est à dire. a = b * x --> a / b = x .
Malheureusement, avec l'algèbre linéaire (c'est-à-dire les mathématiques avec des matrices), la "division" par b n'est pas universelle. Cela ne peut arriver que si b a une propriété que nous appelons "inversibilité", ce qui signifie que pour un système a = B * x nous ne pouvons trouver la solution pour x que si nous peut trouver B ^ -1 . En d'autres termes, a * B ^ -1 = x ne peut exister que si B ^ -1 existe. Concrètement, sans inversibilité, il n'y a pas de solution vitesse moteur x qui nous donnera les résultats souhaités a.
Une matrice ne peut être inversée que si elle carré (lignes == colonnes) ET si le déterminant est différent de 0. La matrice de mixage donnée est la seule combinaison inversible de quatre accessoires qui renvoie des performances symétriques.
N'hésitez pas à jouer avec la matrice sur Wolfram Alpha, vous constaterez qu'il y en a d'autres combinaisons qui ne violent pas l'inversibilité. Ceux-ci sont réalisables et avec des moteurs supplémentaires et ils peuvent même avoir des propriétés souhaitables spéciales (voir l'hexacoptère LVL 1 de CyPhy Work)